链式前向星存图
本质上是用链表实现的邻接表,核心代码如下:
int cnt=1;
void add(int u, int v, int w)//链式前向星存图
{
a[cnt] = {v, w, head[u]};
//a[cnt].w = w;//这三行与上面一行等价
//a[cnt].v = v;
//a[cnt].next = head[u];
head[u] = cnt++;
}
for (int i = head[u]; i; i = a[i].next)//遍历
{}
// head[u] 和 cnt 的初始值都为 -1
void add(int u, int v) {
nxt[++cnt] = head[u]; // 当前边的后继
head[u] = cnt; // 起点 u 的第一条边
to[cnt] = v; // 当前边的终点
}
// 遍历 u 的出边
for (int i = head[u]; ~i; i = nxt[i]) { // ~i 表示 i != -1
int v = to[i];
}
示例代码:
#include <iostream>
#include <vector>
using namespace std;
int n, m;
vector<bool> vis;
vector<int> head, nxt, to;
void add(int u, int v) {
nxt.push_back(head[u]);
head[u] = to.size();
to.push_back(v);
}
bool find_edge(int u, int v) {
for (int i = head[u]; ~i; i = nxt[i]) { // ~i 表示 i != -1
if (to[i] == v) {
return true;
}
}
return false;
}
void dfs(int u) {
if (vis[u]) return;
vis[u] = true;
for (int i = head[u]; ~i; i = nxt[i]) dfs(to[i]);
}
int main() {
cin >> n >> m;
vis.resize(n + 1, false);
head.resize(n + 1, -1);
for (int i = 1; i <= m; ++i) {
int u, v;
cin >> u >> v;
add(u, v);
}
return 0;
}
复杂度
- 查询是否存在 u 到 v 的边:
。 - 遍历点 u 的所有出边:
。 - 遍历整张图:
。 - 空间复杂度:
。
应用
存各种图都很适合,但不能快速查询一条边是否存在,也不能方便地对一个点的出边进行排序。
优点是边是带编号的,有时会非常有用,而且如果 cnt 的初始值为奇数,存双向边时 i ^ 1 即是 i 的反边(常用于网络流)。
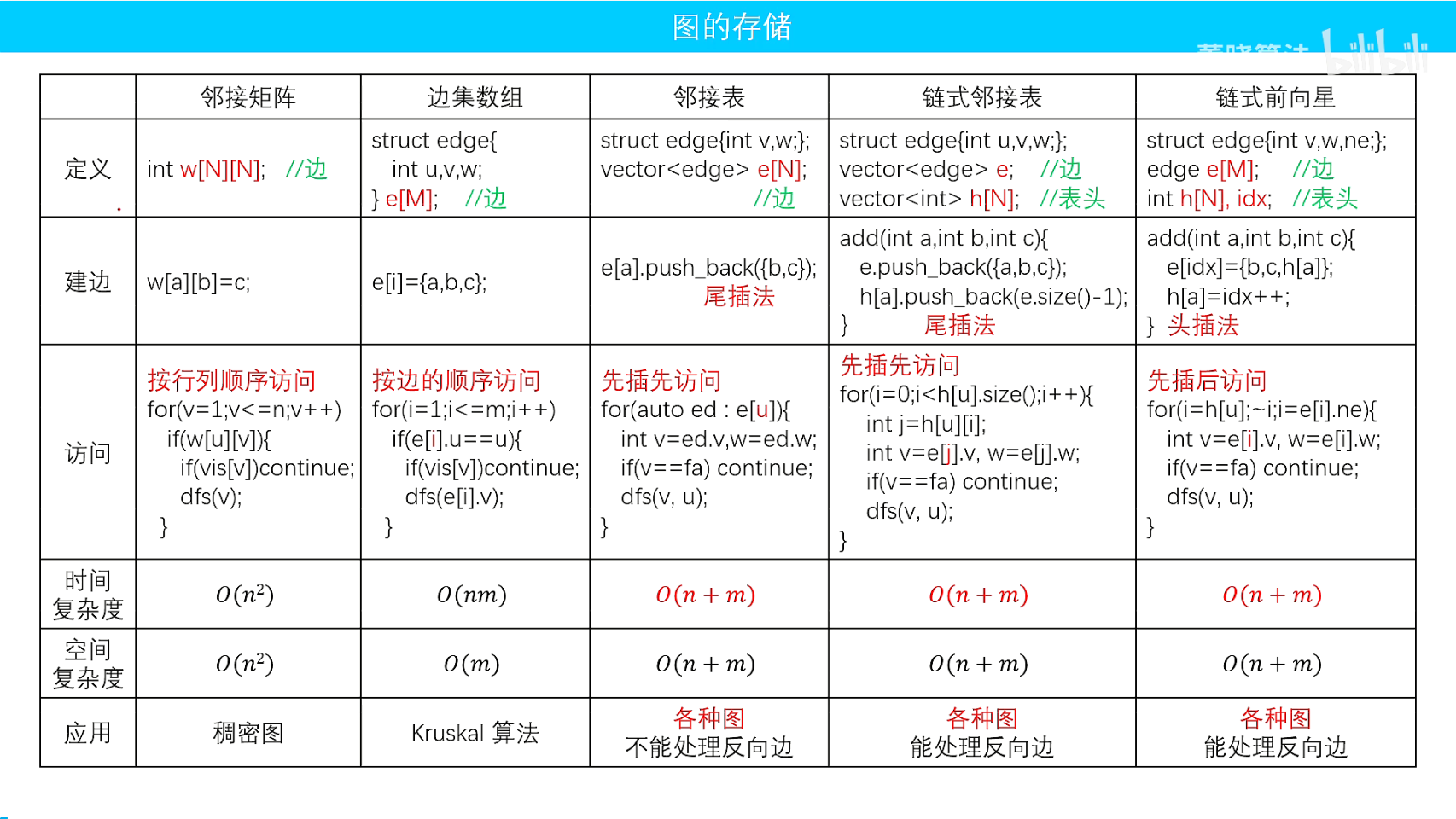
各种图的存储: